Constant-acceleration-time Acceleration/Deceleration for Interpolation-type Positioning Additional Manual Page 3
Additional Manual
Edit
A-77436E
FANUC Series 16
i
/18
i
/21
i
Constant-acceleration-time-manner
Acceleration/deceleration for Interpolation-type
3/4
Title
Drawin
g
No.
Pa
g
e
Data Si
g
nature Descri
p
tion
1998/10/2
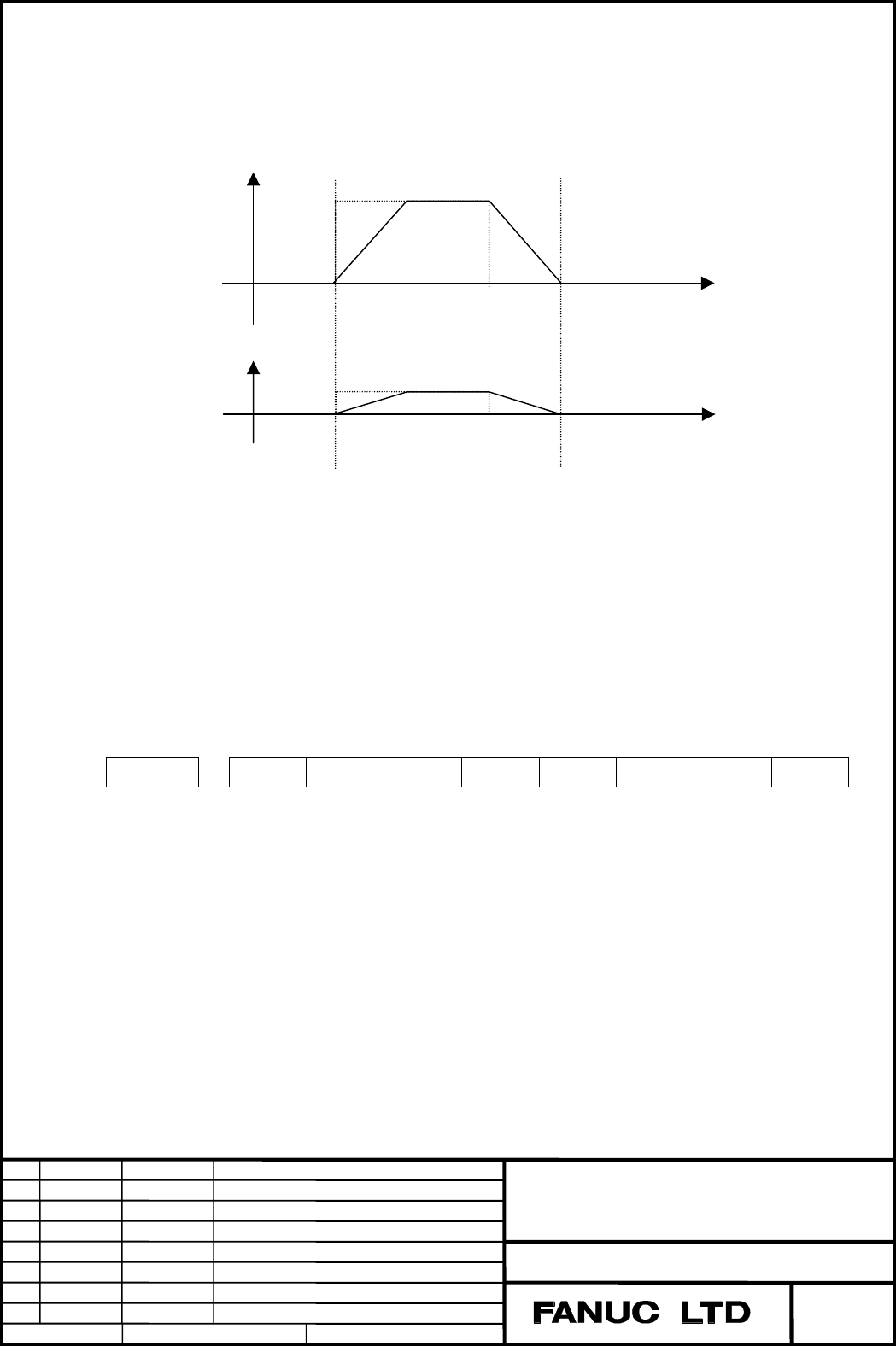
ii) Constant-acceleration-time (parameter No. 1603#4 RPTCT = 1):
In the case that the time constants(parameter No.1620) for X and Y axes are the same.
Deviation of actual positioning path from the programmed path is smaller than that by
constant-acceleration-rate acceleration/deceleration after interpolation.
As a result, positioning is performed more exactly along the programmed path by
constant-acceleration-time acceleration/deceleration (parameter No. 1603#4 RPTCT = 1).
3. Parameters
No. #7#6#5#4#3#2#1#0
1603
RPTCT
[Data type] Bit
RPTCT
Acceleration/deceleration for Linear-type Positioning is performed in:
0: Constant-acceleration-rate manner
1: Constant-acceleration-time manner.
[Note]
In constant-acceleration-time setting, the data range of the parameter No.1620(Time
constant of linear acceleration/deceleration in rapid traverse for each axis) is from 0 to
4096 in total for all axes.
X-axis
Y
-axis
Tim
Tim
Feedrate
Contents Summary of Constant-acceleration-time Acceleration/Deceleration for Interpolation-type Positioning Additional Manual
- Page 1FANUC Series 16i/18i/21i Constant-acceleration-time Acceleration/deceleration for Interpolation-type Positioning Specifications [Contents] 1. Outline ------------------------------------------------- 2. 2. Specification ------------------------------------------------- 2. 3. Parameters -------------
- Page 21.Outline This function enables acceleration/deceleration for interpolation-type positioning (parameter No. 1401#1 LPOS = 1) in constant-acceleration-time manner. As a result, positioning is performed more exactly along the programmed path. 2.Specification Y B A X When positioning from the point A t
- Page 3ii) Constant-acceleration-time (parameter No. 1603#4 RPTCT = 1): In the case that the time constants(parameter No.1620) for X and Y axes are the same. Feedrate X-axis Tim Y-axis Tim Deviation of actual positioning path from the programmed path is smaller than that by constant-acceleration-rate accel
- Page 4No. Time constant of linear acceleration/deceleration in rapid traverse for 1620 each axis [Data type] Word axis [Data unit] msec [Data range] 0 to 4096 in total for all controlled axes [Example] If the number of controlled axes is 4, the following setting can be done: 1st axis: 2048 msec 2nd axis: