Series 16i/18i/21i Additional Manual Page 4
Additional Manual
Edit
Apprv. Desig.
Sheet
Title
Draw
No.
Date
Design
Descri
p
tion
Date
FANUC Series 16i /18i /21i – B, 18i – MB5
Optimal acc/dec decision at positioning
Specification
Oct.4.2004
4/9
A-79261E
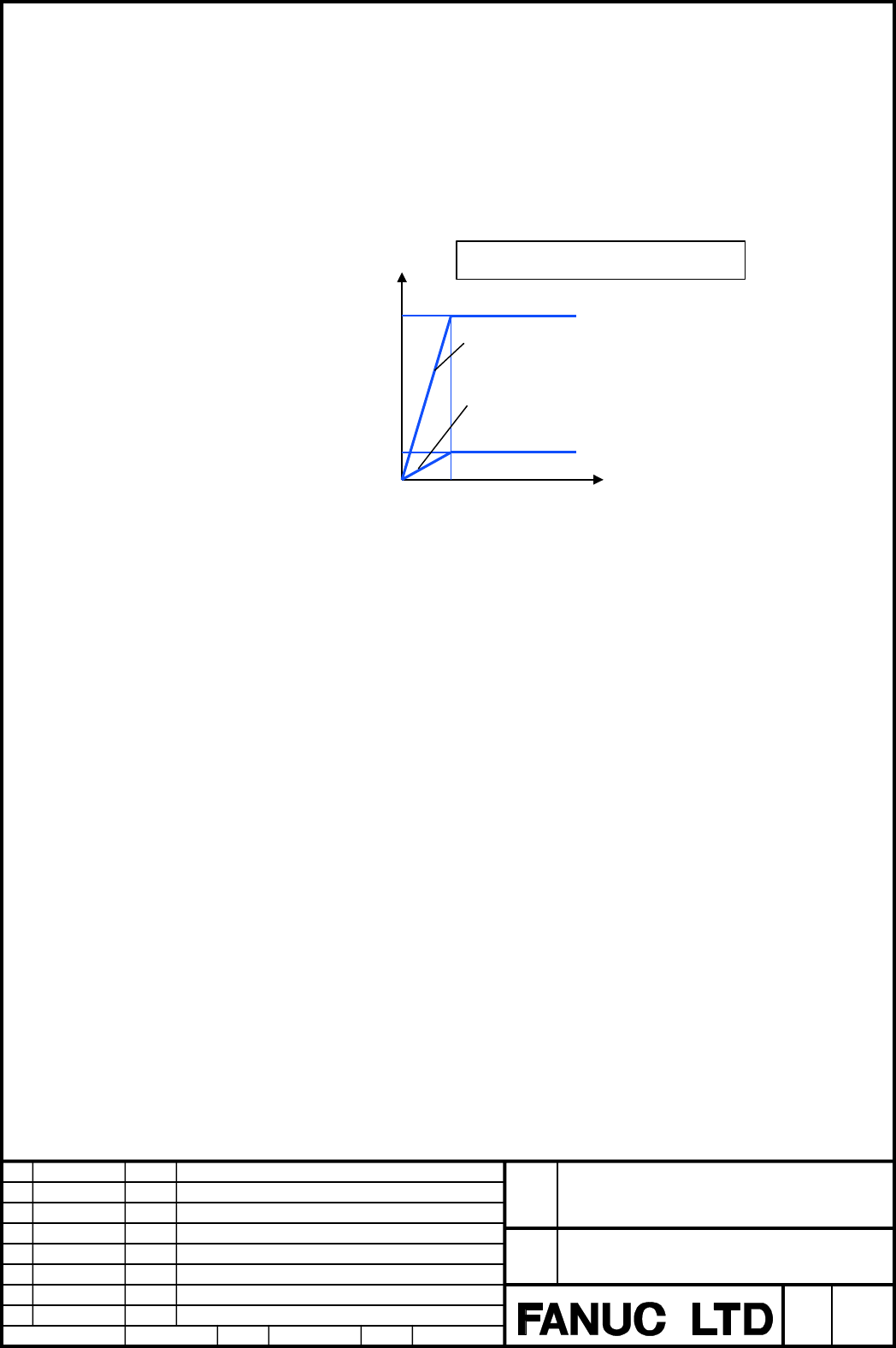
(2) In case that this function is valid.
At every rapid traverse block, the time constant of the axis specified by the
program is automatically calculated to use the maximum acceleration
ability of each axis, and the time constants are changed for the axes with
parameter LRTx (No.1610#3)=1.
Therefore, it is possible to set the time constant according to the maximum
acceleration ability of each axis.
Time
(msec)
Feedrate
(m/min)
100
(Time constant is
changed dynamically.)
Y-a xi s
X-axis
Y
-axis acc. : 10000 (mm/sec
2
) (Maximum acc.)
X
-axis acc. : 1000 (mm/sec
2
)
(
< 5000mm/sec
2
)
60
6
Time constants are changed automatically to use maximum
acceleration ability with same time constants for each axis.
Time constant(No.1620)
:
X = 200 (msec)
Y = 100 (msec)
Others
(1) Even if the feedrate is changed during rapid traverse movement, such as
feedrate override or external deceleration, the time constant is not changed.
(2) As for the time constant at restarting after feedhold stop, the same time
constant, which is used at interrupted block, is used.
(3) During coordinate system rotation, scaling and three-dimensional coordinate
conversion mode, this function is effective to the converted movement value.
(4) As for the tool length offset and tool radius compensation, this function is
effective to the compensated movement value.
(5) During AI contour control and AI nano contour control mode, when the linear
type positioning is used (Parameter AIR (No.7054#1)=0 or parameter LRP
(No.1401#1)=1 is set), the optimum acceleration is selected as well as this
function.
(6) During high precision contour control mode, this function is valid in case of
setting (parameter MSU (No.8403#1)=1, SG0 (No.8403#7)= 0, and STG
(No.8404#0)= 0) to which the rapid traverse is executed by CNC.
(7) During AI/AI nano high precision contour control and 5-axis machining
function with RISC processor, when the rapid traverse with acc./dec. before
interpolation (parameter FRP (No.19501#5)=1) is used, the optimum
acceleration is selected as well as this function.
Contents Summary of Series 16i/18i/21i Additional Manual
- Page 1FANUC Series 16i /18i /21i – MB FANUC Series 18i – MB5 Optimal acc/dec decision at positioning Specification - Contents - 1 OUTLINE............................................................................................................................ 2 2 SPECIFICATIONS..........................
- Page 21 Outline Usually, the linear type positioning (G00) is used at the rapid traverse of an extract motion when machining, especially drilling and tapping machining, on the tilted plane. At the linear type positioning, in order to keep the straight line, it is necessary to use a constant time acc./dec.
- Page 32 Specifications When the following parameter settings, an acceleration/deceleration with keeping the straight line is done at an optimal time constant calculated by the rapid traverse feedrate and commanded movement value for each axis even if the different time constant is set for each axis. Examp
- Page 4(2) In case that this function is valid. At every rapid traverse block, the time constant of the axis specified by the program is automatically calculated to use the maximum acceleration ability of each axis, and the time constants are changed for the axes with parameter LRTx (No.1610#3)=1. Therefor
- Page 5And during AI/AI nano high precision contour control and 5-axis machining function with RISC processor, when the rapid traverse with acc./dec. after interpolation (parameter FRP (No.19501#5)=0) is used, it is not possible to use linear type positioning with a constant time. In this case, please use
- Page 63 Parameters #7 #6 #5 #4 #3 #2 #1 #0 1610 LRT [Data type] Bit axis LRTx Optimal acc./dec. decision at positioning is 0 : Invalid. 1 : Valid. Note 1. This parameter is valid when both parameter LRP (No.1401#1) and RPT (No.1603#4) are “1”. 2. Set this parameter for all axes, which are commanded at G00
- Page 7Time constant T or T1 used for linear acceleration/deceleration or bell- 1620 shaped acceleration/deceleration in rapid traverse for each axis [Data type] Word axis [Unit of data] msec [Valid data range] Type of acc./dec. in rapid traverse Valid data range Non linear type 0 ~ 4000msec Linear type 0
- Page 8Set the value when the rapid traverse override is 100%. The value of T1 is determined from the torque of motor. Usually set the value of T2 to 24ms or 32ms. Time constant T2 used for bell-shaped acceleration/deceleration in rapid 1621 traverse for each axis [Data type] Word axis [Unit of data] msec
- Page 94 Notes (1) This function is invalid for the following feeds. - Cutting feed - Manual rapid traverse - Positioning command of manual numerical control - Positioning command of PMC axis control - Positioning command of chopping function (2) This function is invalid when the following function is atta